Simin LiuI'm a fourth year PhD student at CMU's Robotics Institute. I work on reactive safe control and motion planning, with application to robotic manipulators and drones. In general, my goal is to create safe, useful robots. I'm grateful to be advised by Changliu Liu and John Dolan and supported by the Qualcomm Innovation Fellowship. Before my PhD, I received my BS with high honors in EECS and Math at UC Berkeley. There, I did research with Sergey Levine on adaptive control for legged locomotion. I'm currently looking for internships for summer 2024. Please reach out if you have any leads! Email me at siminliu at andrew dot cmu dot edu CV / Google Scholar / GitHub / LinkedIn |

|
Research |
|
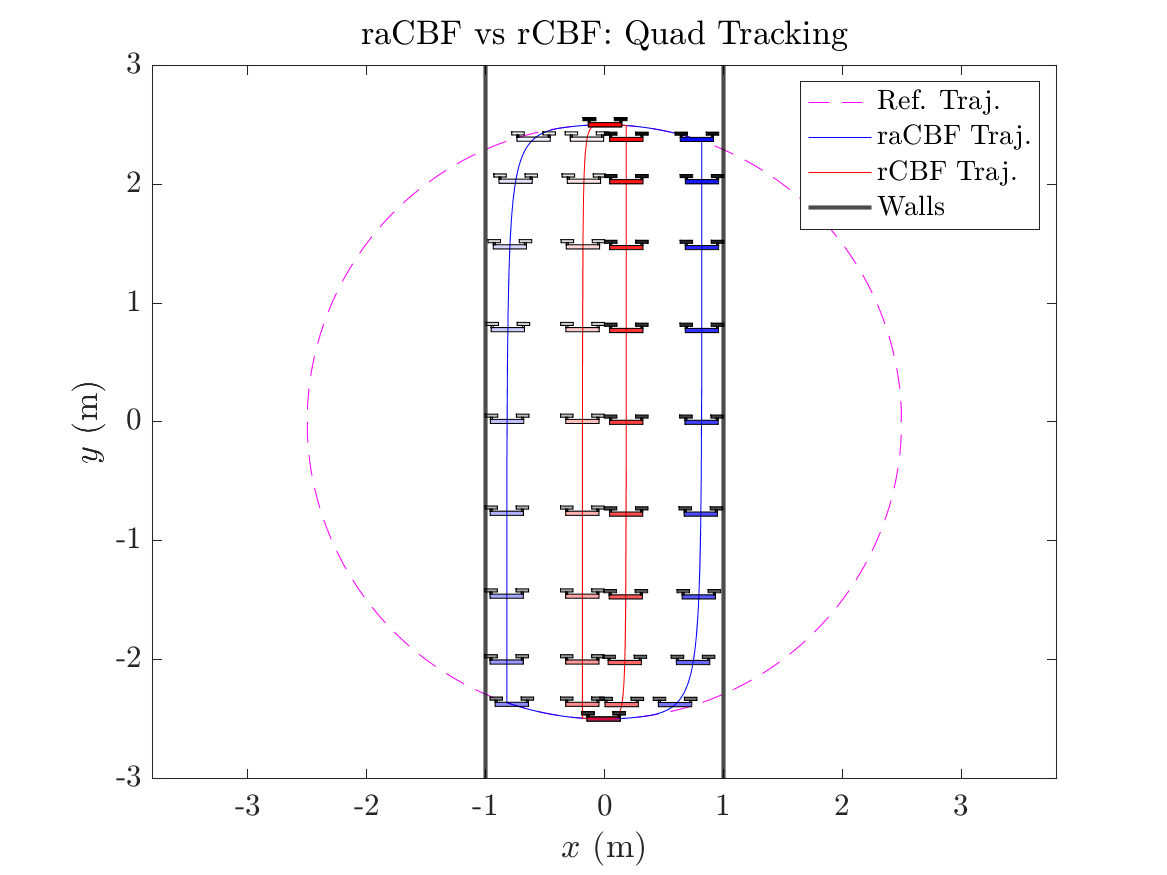
Synthesis and Verification of Robust-Adaptive Safe ControllersSimin Liu*, Kai Yun*, John M Dolan, Changliu Liu Under submission to European Controls Conference, 2023 arxiv / One major drawback of prior work is that it cannot satisfactorily handle model uncertainty. We designed an optimization algorithm for generating robust-adaptive safe controllers, which account for uncertainty without producing over-conservative behavior. Ultimately, our controller allows for 55% better control performance while still ensuring safety as compared to popular baselines. |
|
Safety Index Synthesis via Sum-of-Squares ProgrammingWeiye Zhao, Tairan He, Tianhao Wei, Simin Liu, and Changliu Liu American Controls Conference, 2023 arxiv / Safety indices, also called control barrier functions (CBFs), are popularly used for safe reactive control. However, for all but the simplest systems, it’s hard to find a valid CBF in the first place. We devise an optimization algorithm that can automatically generate a CBF for any moderate-sized, polynomial-equivalent system. This includes simplified vehicles and manipulators. |
|
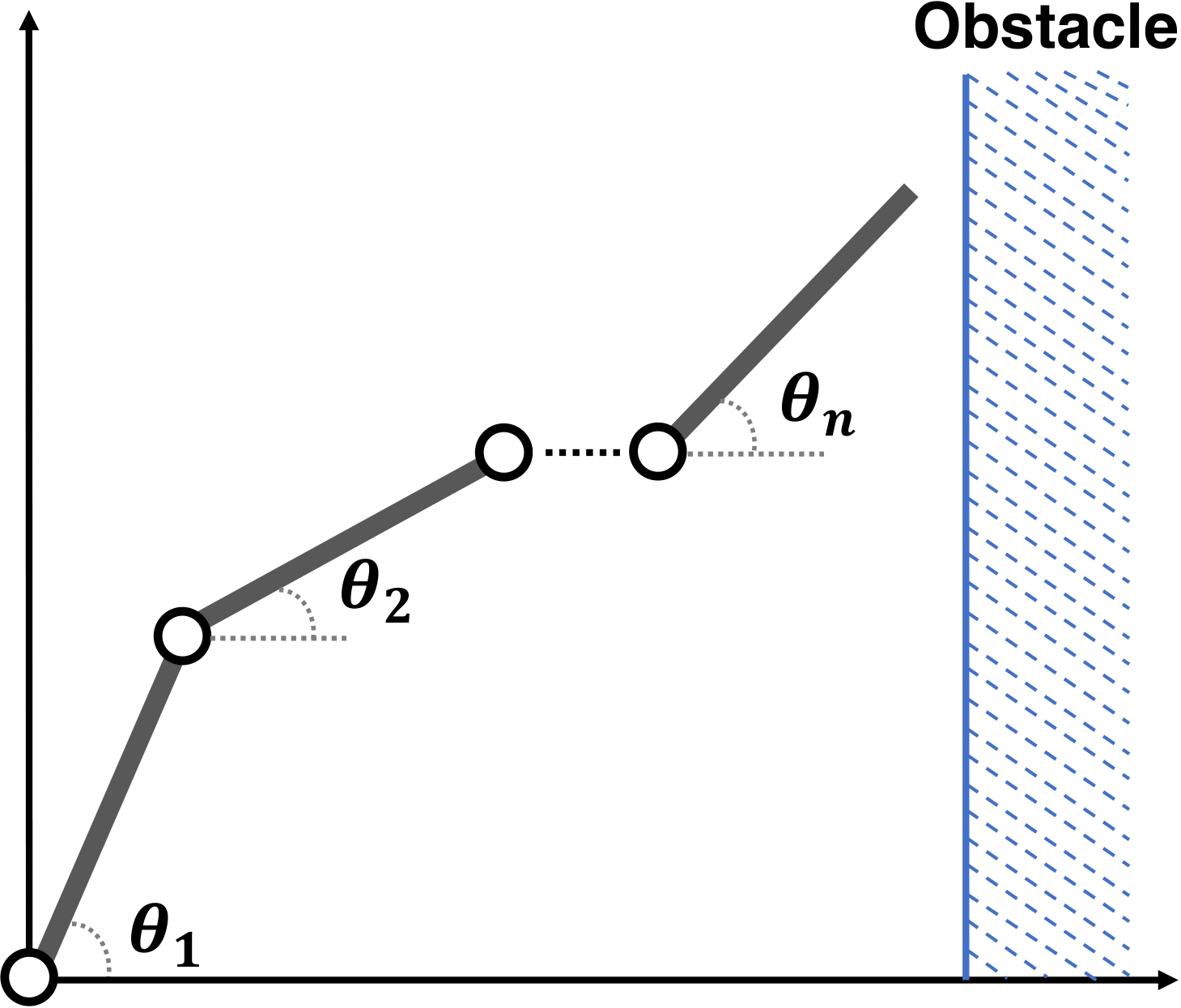
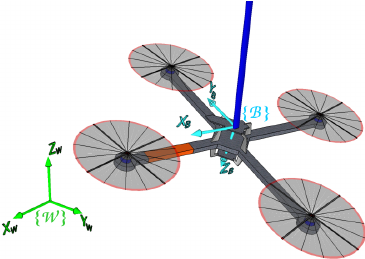
Safe Control Under Input Limits with Neural Control Barrier FunctionsSimin Liu, Changliu Liu, John Dolan Conference on Robot Learning, 2022 arxiv / code / slides / The work below and its alternatives can only scale to 5-7 D systems. We created a much more scalable technique using adversarial training of neural CBFs. Essentially, our method trades the theoretical guarantees of safety for scalability and strong empirical guarantees (>99% safe). Currently, this class of methods has been shown to scale to >20D. This includes complex systems, like balancing quadrotors and many-linked manipulators. |

|
Learning to Adapt in Dynamic, Real-World Environments Through Meta-Reinforcement LearningAnusha Nagabandi*, Ignasi Clavera*, Simin Liu, Ronald Fearing, Pieter Abbeel, Sergey Levine, Chelsea Finn International Conference on Learning Representations, 2018 website / arxiv / code / The system dynamics of robots can sometimes change online (e.g. as the environment changes). To deal with this, we consider adapting a neural dynamics model online. We propose to meta-learn a model initialization and update it online with gradient descent. This scheme can adapt very well after just a few samples of data. We show that a legged millirobot using this scheme can adapt to dynamics that change with terrain, payload, and wear-and-tear. |
HobbiesI like outdoor activities, drawing, ceramics, reading fiction, swimming, running. |
|
Design and source code from Leo Keselman |